Negli ultimi anni sta diventando sempre più frequente l’utilizzo del SEM per la caratterizzazione della texture superficiale, ad esempio per avere una stima della rugosità oppure per lo studio di difetti e porosità.
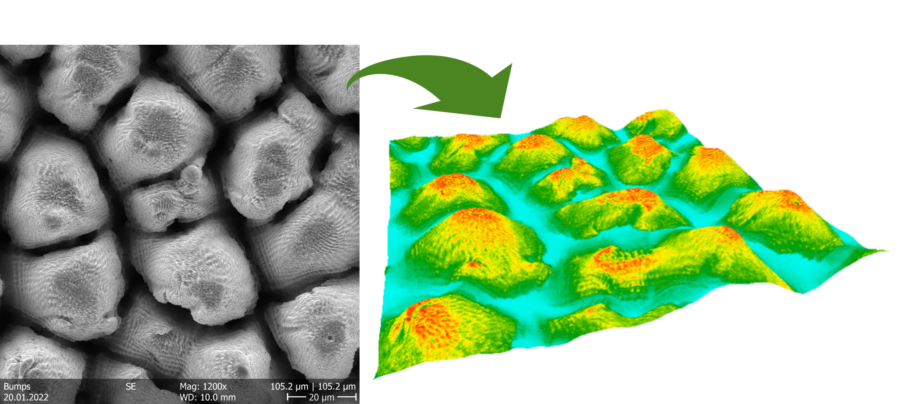
Partendo da una visualizzazione bidimensionale in scala di grigi di una certa area del campione osservata al microscopio elettronico è infatti possibile con opportuni metodi ricostruirne il profilo tridimensionale.
Per ottenere la ricostruzione 3D a partire da immagini SEM, si può ricorrere a due diversi metodi non distruttivi che si differenziano per il numero e il tipo di immagini di partenza e per l’algoritmo di ricostruzione 3D (stereofotogrammetria oppure ricostruzione fotometrica).
Metodo Structure-from-motion: ricostruzione 3D da 2 immagini SEM stereo a diverso angolo di tilt
Lo stereo matching è stato uno dei problemi fondamentali e più studiati in computer vision. È un processo che consiste nell’acquisizione di due o più immagini da diversi punti di vista e nel successivo calcolo del modello 3D basato sulla ricerca dei pixel corrispondenti nelle diverse immagini. Il principio di base coinvolto nella conversione delle posizioni 2D in profondità 3D è la triangolazione.
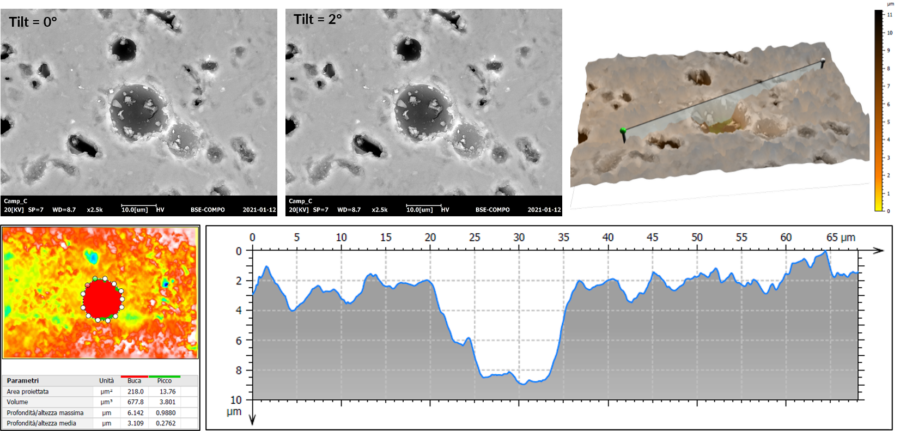
Visualizzare un oggetto da due punti di vista distinti che sottendono un angolo θ a quell’oggetto equivale a prendere due immagini da un unico punto di vista, ma inclinare l’oggetto dello stesso angolo θ tra un’immagine e l’altra. È questa la procedura che viene solitamente utilizzata al SEM: per produrre una ricostruzione stereoscopica, è infatti necessario inclinare il campione di alcuni gradi per acquisire due immagini (stereo-pair) della stessa regione di interesse.
L’algoritmo per la ricostruzione 3D a partire dalle due immagini stereoscopiche si basa sulla misurazione della disparità, ossia lo spostamento (in pixel) di un punto nel campione tra un’immagine e l’altra. Essendo noti tutti i parametri geometrici interessati nel calcolo (working distance, ingrandimento e angolo di tilt), la triangolazione genera un oggetto tridimensionale in cui non soltanto i valori di x e y, ma anche i valori calcolati in z sono valori assoluti.
I vantaggi di questo metodo di ricostruzione 3D consistono nella non necessità di calibrare il metodo con particolari standard e nella possibilità di acquisire le due immagini stereo sia con il detector di elettroni retrodiffusi BSE (Fig.2), sia con il detector di elettroni secondari SE, che fornisce una migliore risoluzione della topografia superficiale (Fig.1).
È inoltre possibile combinare le immagini prese al SEM con le mappe chimiche acquisite con detector EDS: la mappa chimica dell’area di interesse può infatti essere sovrapposta alla ricostruzione 3D mediante analisi correlativa per ottenere una 3D EDS Map.
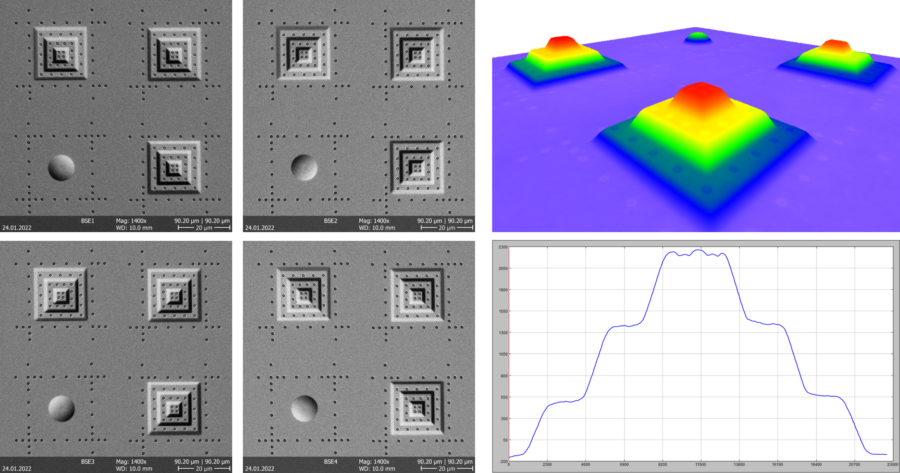
Metodo Shape-from-shading: ricostruzione 3D con detector BSE a 4 quadranti
Utilizzando le immagini acquisite con ciascuno dei quattro settori del detector di elettroni retrodiffusi (BSE) è possibile derivare la topografia tridimensionale della superficie a partire dalla diversa ombreggiatura presente in ciascuna immagine.
La ricostruzione della superficie è molto veloce e non richiede l’inclinazione del campione poiché la topografia viene calcolata dalle quattro immagini BSE che vengono salvate simultaneamente al SEM.
Con questo metodo tuttavia, il calcolo delle altezze dipende da diversi parametri geometrici e di imaging e richiede pertanto una calibrazione spaziale con campioni standard, solitamente delle micro-piramidi con scalini ad altezze note (Fig.3). Nello specifico la calibrazione comprende la regolazione del guadagno e dell’offset dei 4 segnali, nonché il controllo delle proprietà geometriche del rivelatore (distanza dal campione, angolo rispetto alla scan rotation, area di rilevamento, raggio di curvatura a bassi ingrandimenti). Con la procedura di calibrazione vengono stimati non solo i fattori di scala laterale, ma anche la scala in z e le deviazioni non lineari, per consentire una valutazione dell’accuratezza dei dati topografici.
Gli algoritmi di ricostruzione 3D più recenti tengono in considerazione tutti questi aspetti e consentono di ottenere una mappatura senza distorsioni della topografia superficiale su un ampio intervallo di ingrandimenti, anche in modalità 3D Live, ossia in tempo reale mentre ci si sposta sul campione.